

กรณี
ข่าว
-
2024-04-24Unlock the Power of Precision with Geosun Navigation!At Geosun Navigation, we're revolutionizing the way you perceive precision mapping and navigation. ...
-
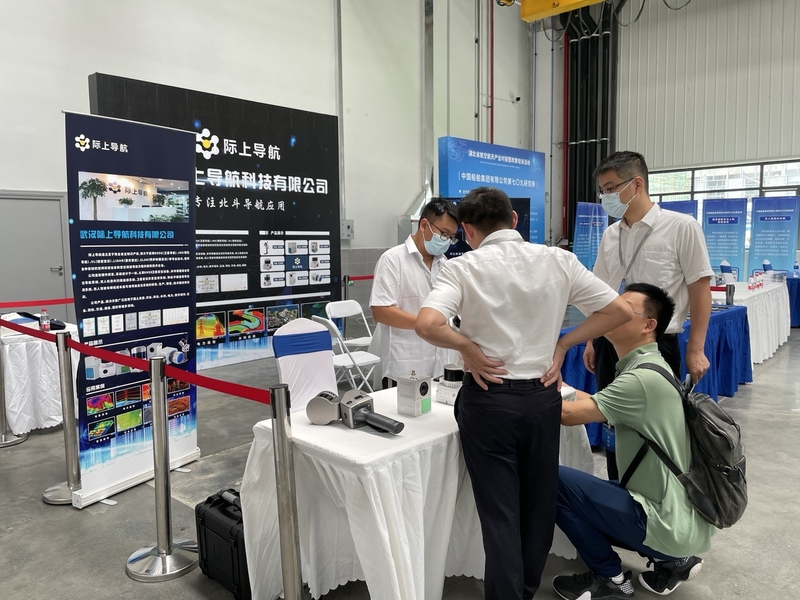
2024-03-22GEOSUN จัดแสดงเทคโนโลยี LiDAR ในงานเศรษฐกิจและการค้า "U Select Hubei"...เมื่อวานนี้ GEOSUN มีโอกาสอันทรงเกียรติในการเข้าร่วมงานเศรษฐกิจและการค้า "U Select Hubei" ซึ่งจัดขึ้...
-
2024-03-19ดร. ซัน ผู้นำของ Geosun Navigation กล่าวสุนทรพจน์เกี่ยวกับเทคโนโลยี LiDAR ที่มหาวิทยาลัยหวู่ฮั่น...ดร. ซุน ผู้นำคนสำคัญของ Geosun Navigation กล่าวเมื่อเร็วๆ นี้ที่มหาวิทยาลัยหวู่ฮั่น โดยให้ความกระจ่า...